展位號:C501 & A106
展區位置:北京北人亦創國際會展中心
時間:2025年8月8日-8月12日
2025世界機器人大會(WRC 2025)正在北京舉行。作為全球機器人與具身智能領域的重要展示平臺,本屆大會聚焦智能機器人、機器人應用場景拓展關鍵技術突破等,匯聚了來自科研、產業與技術前沿的代表性成果。在WRC 2025世界機器人大會的展廳中,靈初智能以真實、多樣的任務演示,吸引著一波又一波觀眾駐足。

麻將桌上,機器人與三位真人持續對戰,機器人雙手協同、自主碰杠;打包區域,機器人接收自然語言指令后自動完成商品識別與封裝;配送模擬場景中,機器人接受下單指令,便可自主進行打包、提袋、配送,完成“最后一百米”的全流程交付。作為具身智能領域領軍企業,靈初智能在本屆大會上,聚焦三大核心場景,全面展示其長程、靈巧能力的突破。應用覆蓋零售物流、泛工業、展示娛樂等多個領域,展現了從數據、模型算法、硬件到場景應用的完整技術鏈條。
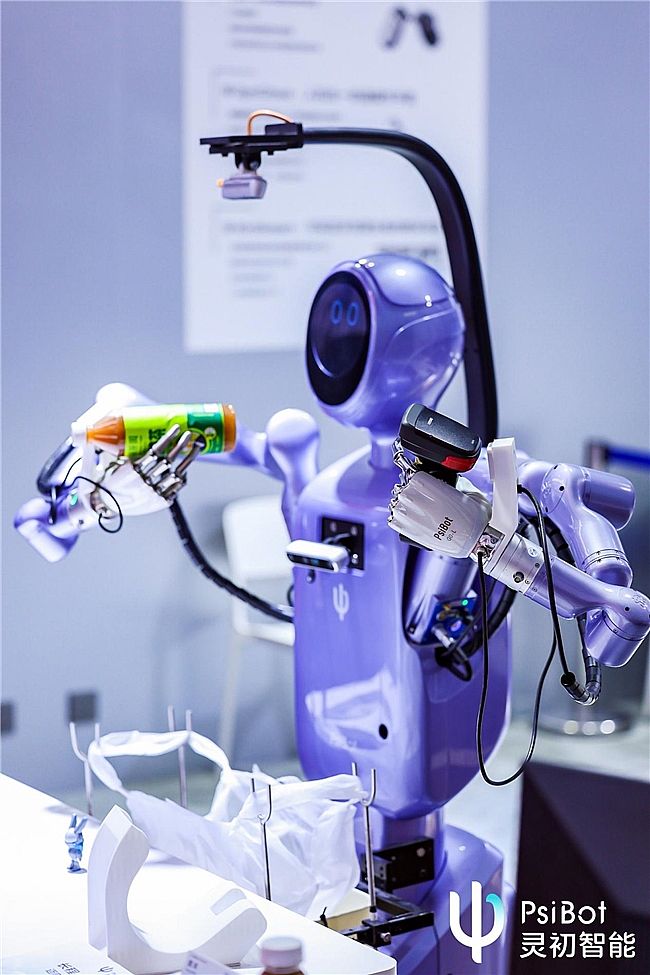
圖注:靈初智能亮相WRC 2025
三大場景展示具身智能長程、靈巧能力突破
由靈初自研的分層端到端VLA模型與強化學習算法體系提供驅動支撐,本次靈初智能展出的場景Demo均源于真實客戶需求與落地任務驗證,覆蓋長程復雜任務、開放場景操作、通用泛化性抓取等具身智能落地過程中的關鍵挑戰:

圖注:靈初智能亮相WRC 2025
1. 麻將機器人:開放環境下的長程復雜任務
靈初智能麻將機器人與現場觀眾同桌博弈的場景吸引了眾多參觀者圍觀。機器人可與現場觀眾共同完成30分鐘以上的連續麻將對局,以毫米級精度完成摸牌、放置、碰杠等復雜操作,在與人類玩家的實時博弈中展現策略思考,動態構建決策鏈,自主完成碰杠等博弈決策。觀眾不僅可以現場觀看,更能親自上桌與機器人對弈,體驗機器人如何融合視覺、語言與動作信息,形成游戲博弈和具身操作的融合,展示真正意義上的"會思考的手"。

圖注:機器人與現場觀眾共同完成30分鐘以上的連續麻將對局

圖注:機器人自行抓牌和打牌、完成碰杠等博弈決策
2. 自主打包任務:勝任商品級泛化、工具使用、柔性物體操作
從博弈場景轉向實用應用,展會現場的零售打包演示區展現了靈初智能在商業場景中的技術實力。機器人僅接收"將桌面物品打包"的自然語言指令,便可自主分析商品排列、確定操作順序、完成掃碼與裝袋動作。整個流程基于VLA模型的分層架構:上層大模型負責理解任務并規劃順序,下層強化學習控制器負責執行動作細節,支持商品級泛化與實時調整,無需逐一標注或人工干預。

圖注:自主完成掃碼打包泛化抓取的全流程
3. 解決復雜柔性物體操作:打通配送機器人“最后一百米”
在物流配送應用展示中,靈初智能外賣配送機器人演示了"最后一百米"配送難題的解決方案。面對快遞袋、紙袋等多樣化、易變形的配送物體,機器人精準識別不同形態與擺放姿態,靈巧手如人手般靈活穿過提環并穩固握緊,憑借強大的泛化性和動態性能,還能對變形物體進行處理,無論何種規格、輕重的袋子都能安全穩定地提起。整個過程實現端到端的自動化操作,無需人工干預。在實際配送場景中,該機器人能夠自主導航至目標位置,靈活避開行人和障礙物,配備7自由度機械臂和6自由度靈巧手,能夠處理3kg負載的配送任務,為外賣、物流配送場景提供了完整的智能化解決方案。

圖注:靈巧手如人手般靈活穿過提環并穩固握緊

圖注:機器人自主導航,完成配送任務
技術路徑回歸任務本質:從模型到任務鏈的閉環協同
1. 陳源培:
在“AI大模型賦能機器人與具身智能產業新范式”論壇中,靈初智能聯合創始人陳源培發表了主題演講《邁向通用具身靈巧操作新紀元》,回顧了靈巧操作的發展歷程,并展望了未來的合作方向。
他指出,具身智能的發展可以從四個核心環節理解——本體、場景、數據與算法,這些環節彼此循環影響。“算法不僅依賴硬件,也可以反過來定義硬件,比如決定一只靈巧手需要怎樣的結構與指標。”
在算法水平上,他將當前能力分為四個層級:從以CV方法實現的固定動作自動化,到具備一定泛化性的模仿學習,再到能夠處理長程任務和高成功率的VLA+強化學習。“我們一開始就瞄準了L3——長程性和靈巧性,這里正是VLA與強化學習的結合點。”
談及VLA技術,陳源培分享了靈初提出的分層“大腦—小腦”架構,并補充道:“關鍵不只是端到端,而是如何做長程任務,以及如何把強化學習融入進去。”在這一架構中,上層Planner通過思維鏈(CoT)選擇合適的任務,下層Controller負責精細執行,通過Action Token實現上下層的高效銜接,使長程任務“絲滑”串聯,成功率顯著提升。

他還介紹了靈初在長程任務訓練中的創新方法——上下優化框架。以搭樂高為例,將“翻找—轉向—抓取—插入”四個技能在仿真中用強化學習分別訓練,再通過上下層協同優化,解決了任務銜接中初始狀態不匹配的難題,實現了多物體、多形態下的穩定泛化。
數據策略方面,陳源培提出了“互聯網數據—仿真數據—真實數據—真機數據”的四層體系,并特別強調引入高價值的人手雙手靈巧操作數據。“人手和靈巧手的形態與操作最接近,gap最小。通過強化學習優化,人類的數據可以高效遷移到機械手上。”這一方法將物體目標軌跡轉化為統一的獎勵函數,使RL能夠訓練出多樣化的靈巧操作,并順利從仿真遷移到真機。
“我們做靈巧手,不只是為了一個任務,而是為了最終走向通用具身智能。”陳源培表示,硬件會做到極致的性價比,從ToB場景切入,積累數據與模型,最終提升跨場景的泛化能力,為ToC規模化落地奠定基礎。

2. 黃貝寧:
在“AI大模型賦能機器人與具身智能產業新范式”論壇的《機器人與具身智能應用場景創新與產業鏈協同》圓桌上,靈初智能副總裁黃貝寧結合公司在 VLA 驅動的麻將機器人實踐,分享了對當前及未來具身智能發展的觀察。
他首先談到,雖然“VLA”已成為業內熱詞,但現實中能夠完整、深度體驗其價值的機會并不多:“很多演示只展示了很短的過程,以至于觀眾看不出 VLA 在其中發揮了什么作用,甚至不清楚到底哪個環節是 VLA 做的。”為此,靈初做了一個“完全用 VLA 實現的麻將機器人”作為探索。黃貝寧介紹,這一機器人通過大模型視覺感知識別牌桌布局,推理出抓牌、出牌策略,并在博弈過程中實時輸出思維鏈——包括當前手牌、對手出牌情況以及最優行動判斷。“和傳統棋牌機器人不同,這個機器人會讓你真切感受到它在‘想’。”
在現場演示中,三位真人玩家與機器人同桌對弈,通過語音和肢體動作進行自然互動。“我要碰”“我胡了”等口令,配合出牌、棄牌的肢體動作,讓人獲得一種不同于傳統棋牌機器人演示的沉浸體驗。黃貝寧指出,這一小小的麻將場景,實際上涵蓋了具身智能的多項關鍵能力:雙臂、雙靈巧手的動作控制,語音交互,表情展示,以及實時推理與執行。“我們甚至考慮過,如果機器人有‘皮膚’和更擬人的表情,會讓互動體驗更好。”

展望未來趨勢,他認為,VLA 驅動的應用會出現在越來越多的場景中,讓更多人感受到它與傳統技術的差異。同時,行業的最終目標是“實現通用的、能做各種事的機器人”,這意味著需要將雙臂、靈巧手、語音、觸覺、力控等多種能力集成在一個本體中。
“現在各家的機器人都各具特色,但沒有一臺能把市面上所有機器人的能力集成到一起。”黃貝寧表示,“未來最應該做的,是把各個環節的突破性技術集成起來,形成真正綜合的能力。”

真正的具身智能,始于長程靈巧
本次WRC展示的技術成果背后,體現了靈初智能在具身智能領域的深厚積累。當整個行業還在L1泛化抓取階段徘徊時,靈初智能已經突破了L2靈巧操作的行業分水嶺,并在L3長程靈巧操作領域建立了領先地位。公司發布的Psi R1模型首次實現30分鐘連續麻將博弈,展現了機器人在開放環境下處理復雜任務的突破性能力,這標志著具身智能從簡單動作執行向真正的認知決策和長程操作的關鍵躍遷。
作為具身智能的領軍者,靈初智能構建了完整的四大支柱技術生態:仿真+真實數據的特數據金字塔、基于CoAT(Chain of Action Thought)框架的VLA模型、極致穩定與性價比的硬件整機(帶有21個自由度的自研靈巧手),以及從制造到物流的全場景落地驗證及數據回環。這四大支柱協同作用,讓靈初智能能夠為制造業、零售業、物流業等客戶提供真正可規模化的具身智能解決方案。
誠邀各界伙伴在WRC 2025期間,蒞臨靈初智能 C501 和 A106 展位,共同探討具身智能技術的無限可能。
關于靈初智能
靈初智能(PsiBot),作為國內具身智能科技領域的領軍企業,專注深耕通用具身智能、VLA大模型以及靈巧操作算法等前沿技術。公司的核心團隊成員均來自頂尖高校的 AI 實驗室以及頭部科技企業,匯聚了行業內的頂尖人才。 憑借深厚的技術積累與創新能力,靈初智能成功推出了行業內首個分層端到端強化學習具身模型 Psi R0、R0.5及R1,成為行業內率先實現長程任務的具身模型研發企業,并且兼具泛化性、魯棒性、靈巧性。該成果獲得了行業頭部客戶的高度認可,目前,靈初智能正全力加速推進相關技術的商業落地進程,引領具身智能技術邁向新的發展階段。





 明基投影機
明基投影機 堅果投影機
堅果投影機 科視投影機
科視投影機 極米投影機
極米投影機 SONNOC投影機
SONNOC投影機 寶視來投影機
寶視來投影機 視美樂投影機
視美樂投影機 當貝投影機
當貝投影機 哈趣投影機
哈趣投影機 WAP手機版
WAP手機版 建議反饋
建議反饋 官方微博
官方微博 微信掃一掃
微信掃一掃